
航空工业通飞2026校招提前批解读:不限专业真能投?
解析航空工业通飞2026秋招提前批,澄清“物流供应链”标签背后的真实业务。分析不限专业的投递机会、岗位偏向运营保障而非核心研发的特点,帮助应届生判断是否值得在8月16日截止前投递。
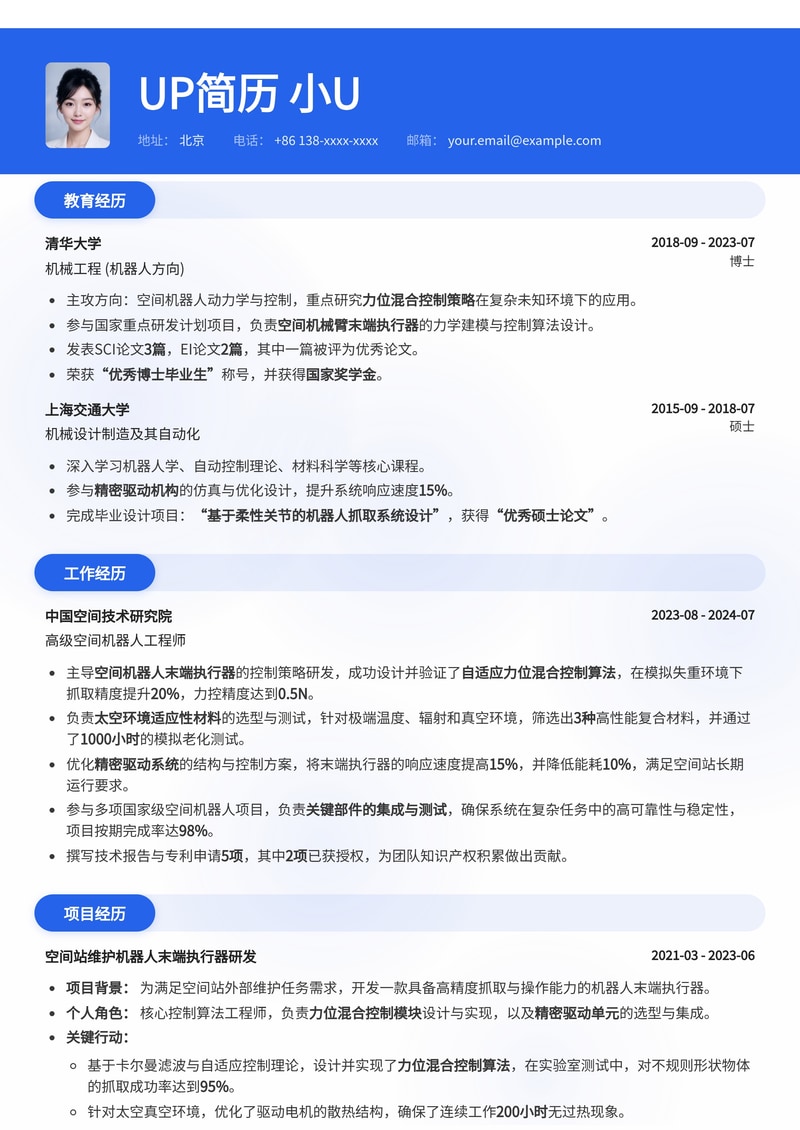
此模板专为空间机器人末端执行器领域专业人士设计,突出展示在力位混合控制、太空环境适应性材料应用以及精密驱动技术方面的深厚专业知识和项目经验。模板结构清晰,强调技术细节与实际成果,助力求职者在航天、机器人和高端制造领域脱颖而出。特别适合有志于深空探测、卫星维护和空间站建设等前沿领域的工程师。
本模板特别适合空间机器人末端执行器岗位的求职者使用,具备不限工作经验的专业人士, 通过工程技术风格的设计,帮助您在航天航空 行业中脱颖而出,展现专业形象和核心竞争力。
使用模版创建简历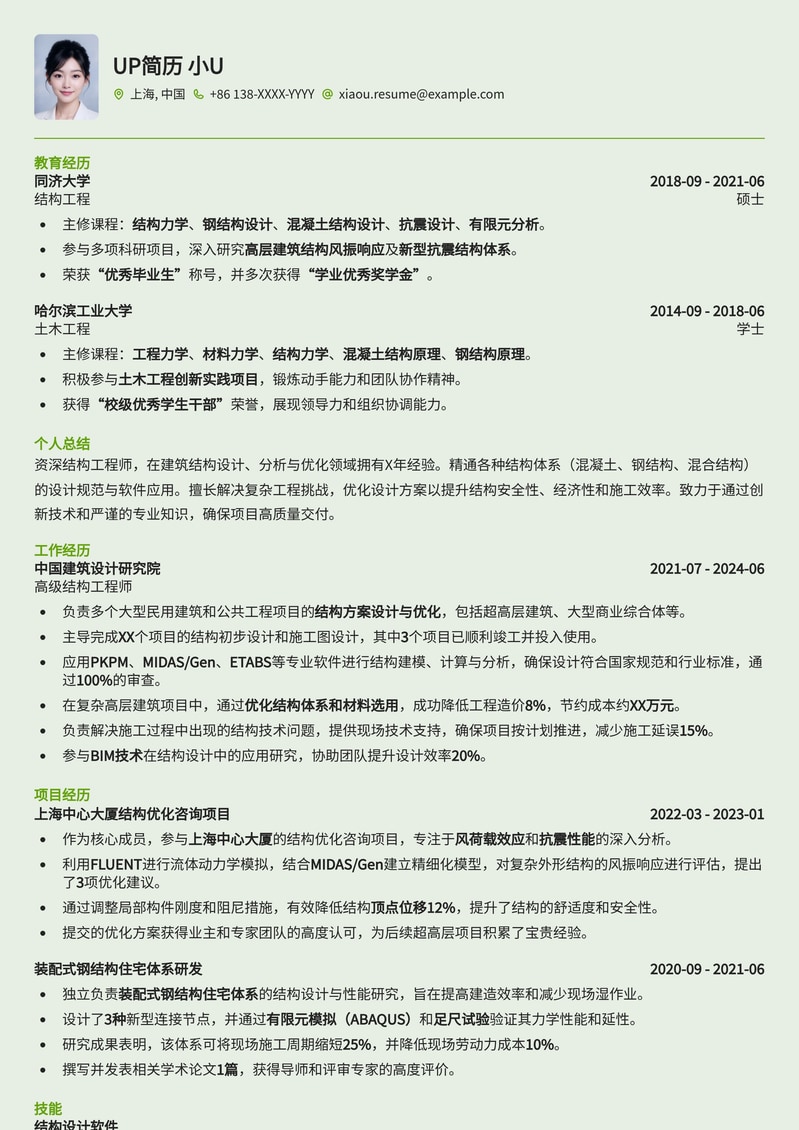
这款结构工程师简历模板专为土木与建筑行业的结构工程师量身定制。模板设计简洁专业,突出项目经验和技术能力,帮助您清晰展示结构设计、力学分析、BIM应用等核心技能。适用于寻求职业发展、跳槽或社招的结构工程师,助您在众多求职者中脱颖而出,获得理想的结构工程师职位。
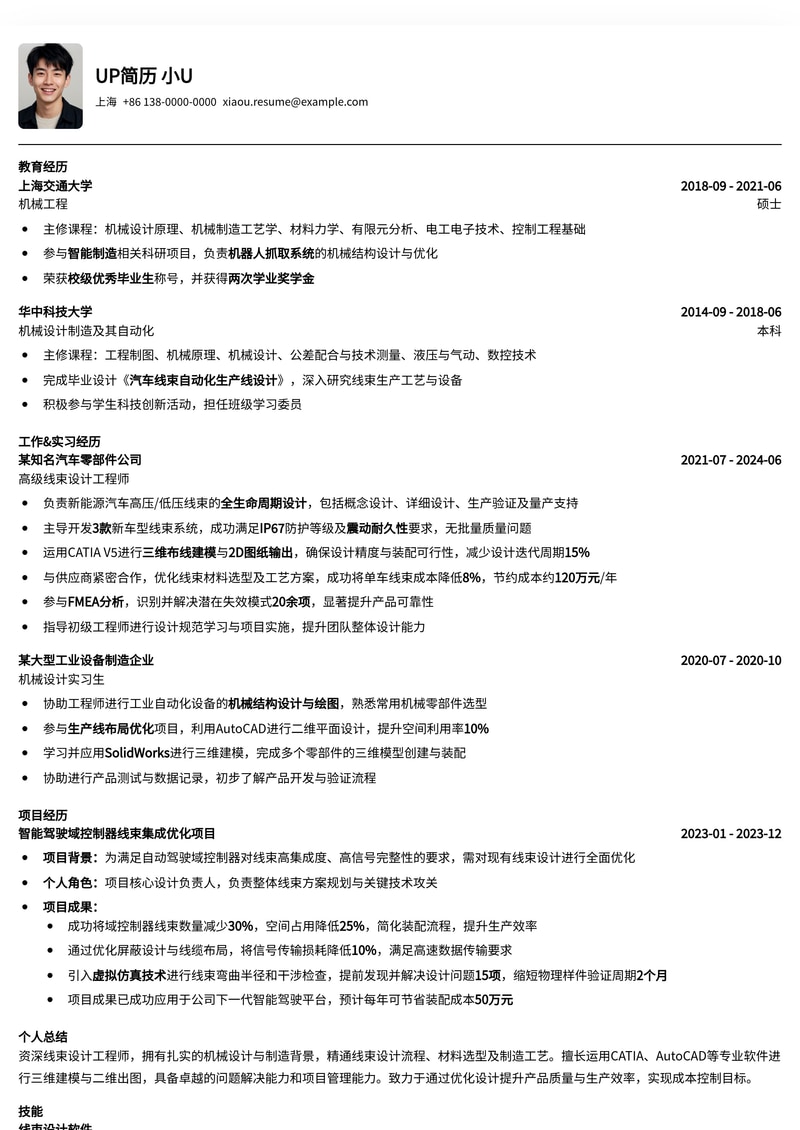
本模板专为线束设计工程师量身打造,强调项目经验、技术能力与解决问题能力。版面布局清晰,突出关键信息,助力您在众多求职者中脱颖而出。适用于汽车、航空、电子等行业,无论是资深专家还是初级工程师,都能通过此模板清晰展示专业素养和职业发展潜力。
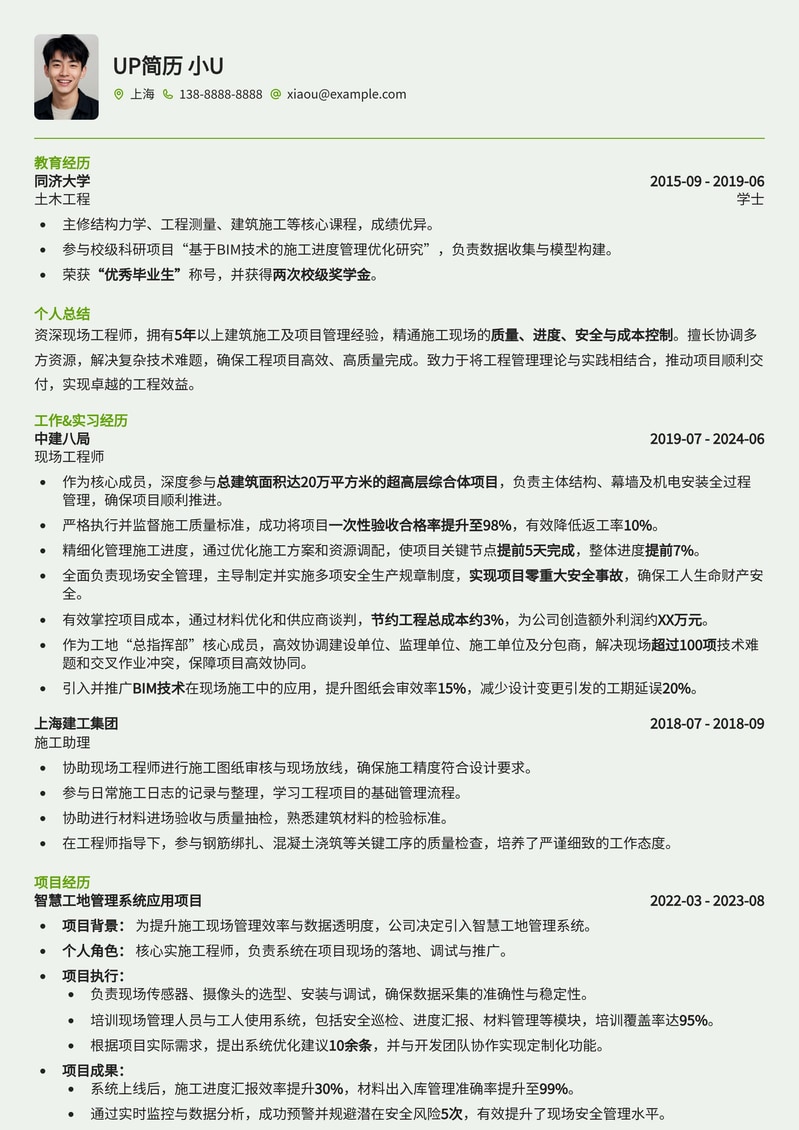
本模板专为现场工程师量身定制,突出其在工地管理、质量监督、进度控制、安全保障及成本优化方面的核心能力。设计简洁高效,强调项目经验和解决问题能力,助力您成为工地的“总指挥部”。适用于土木、建筑、施工等相关行业的各类现场工程师职位。
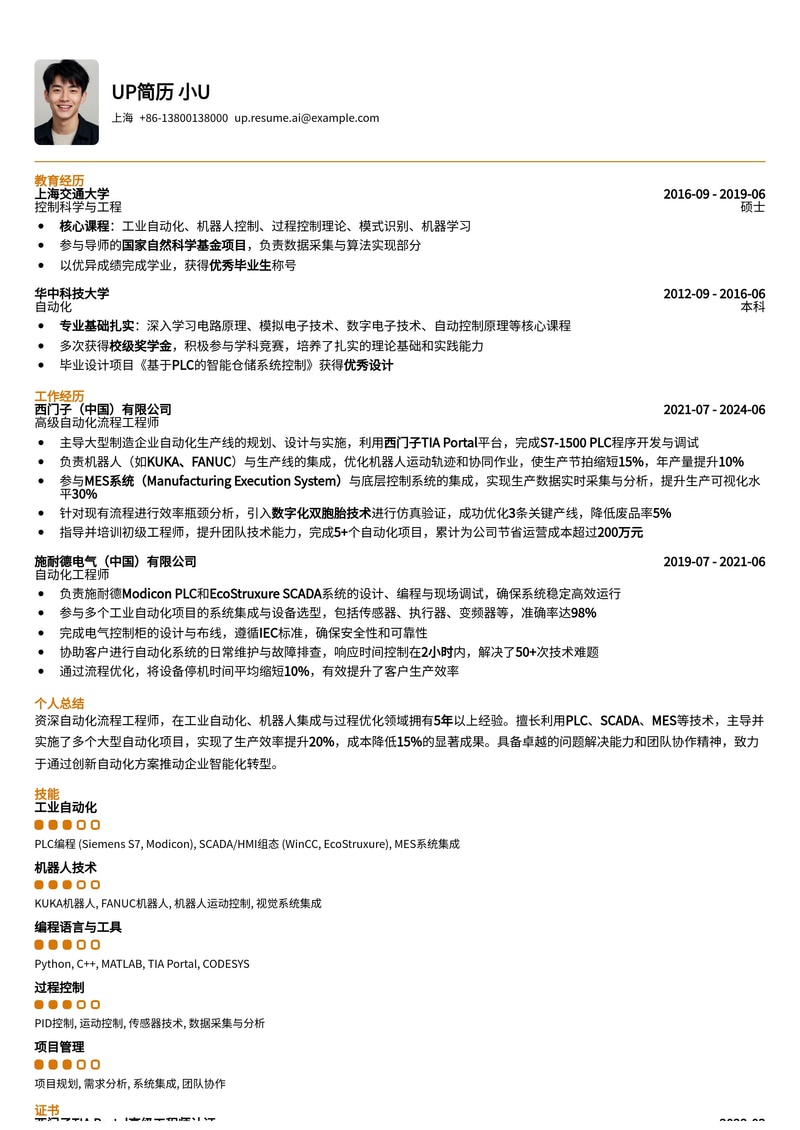
此自动化流程工程师简历模板专为寻求在智能制造、工业自动化或流程优化领域发展的专业人士设计。模板突出项目经验、技术专长和解决问题的能力,适用于具备PLC编程、SCADA系统、机器人技术、DCS系统、工业物联网(IIoT)等技能的工程师。清晰的结构和专业的排版,帮助您在众多求职者中脱颖而出,展现您在提高生产效率、降低运营成本方面的卓越贡献。
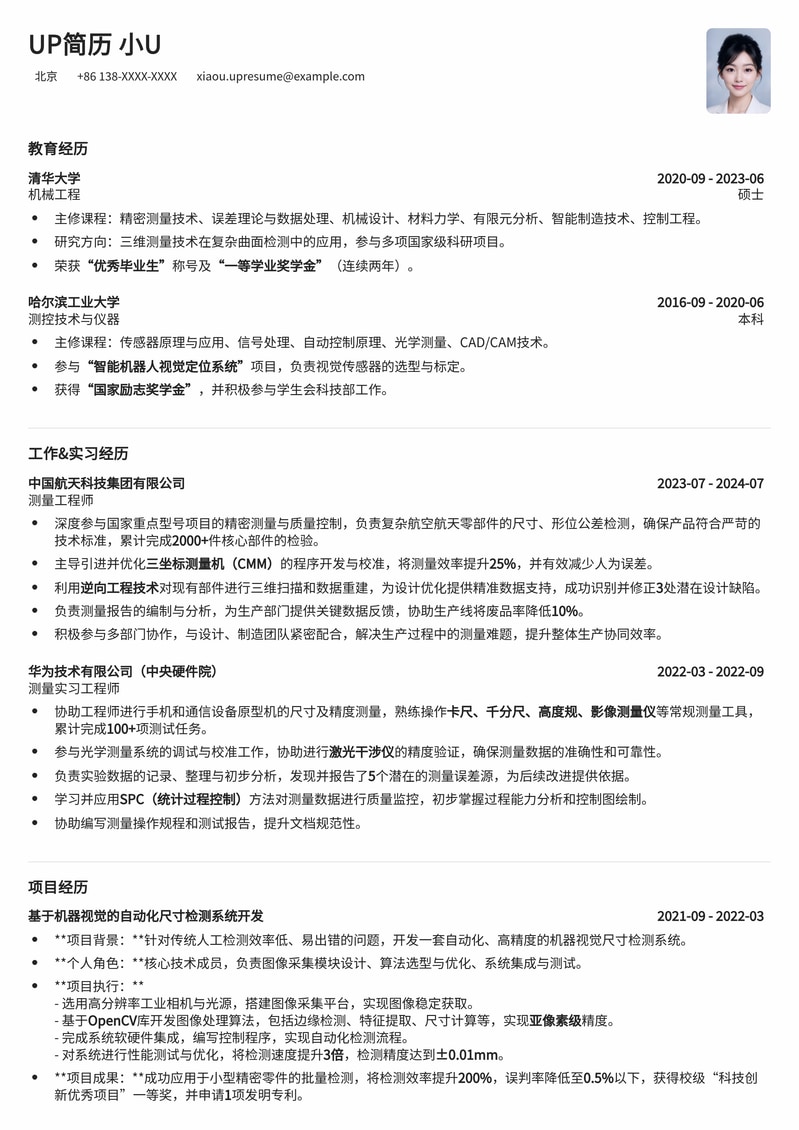
本测量工程师简历模板专为机械类岗位设计,突出候选人在测量技术、设备操作及数据分析方面的专业能力。模板排版清晰,重点突出项目经验和技术专长,帮助测量工程师在众多简历中脱颖而出,获得心仪的面试机会。
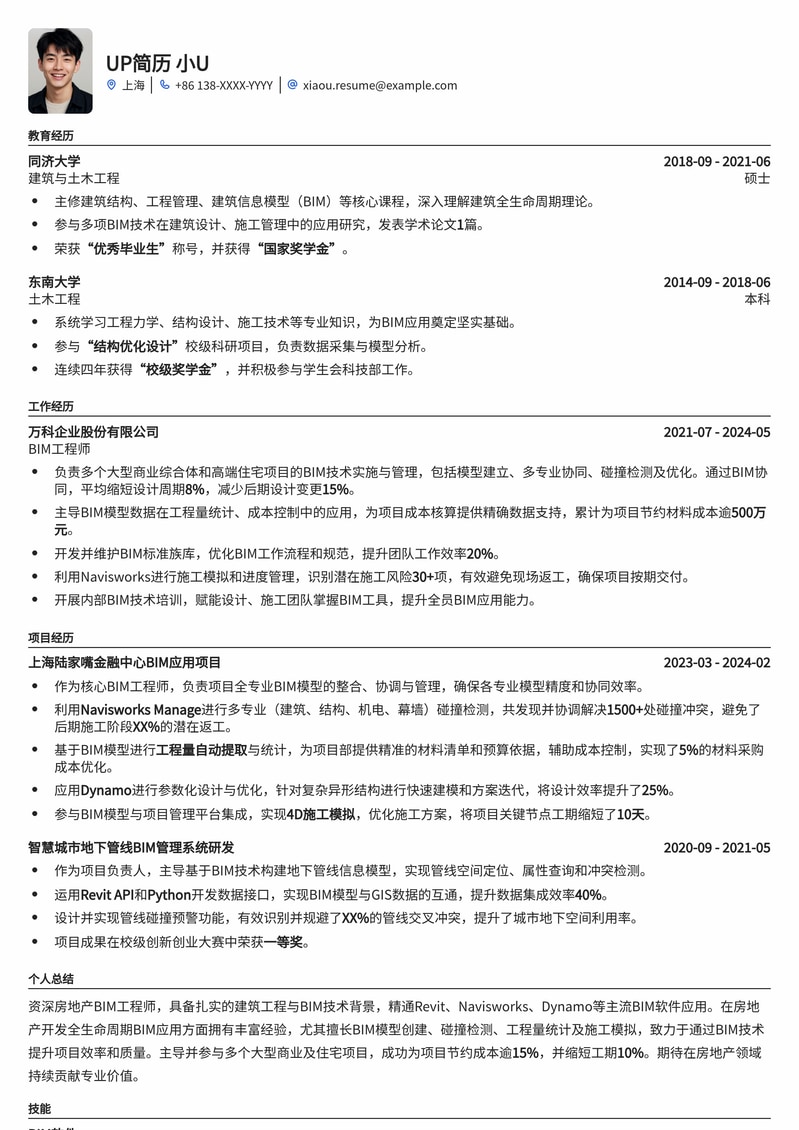
专为房地产BIM工程师量身定制的专业简历模板,突出项目经验、BIM软件技能与成果转化能力。结构清晰,重点突出,助您在众多求职者中脱颖而出,快速获得心仪的房地产BIM工程师职位面试机会。本模板深度优化,符合房地产行业招聘偏好,强调BIM技术在房地产项目中的实际应用价值。
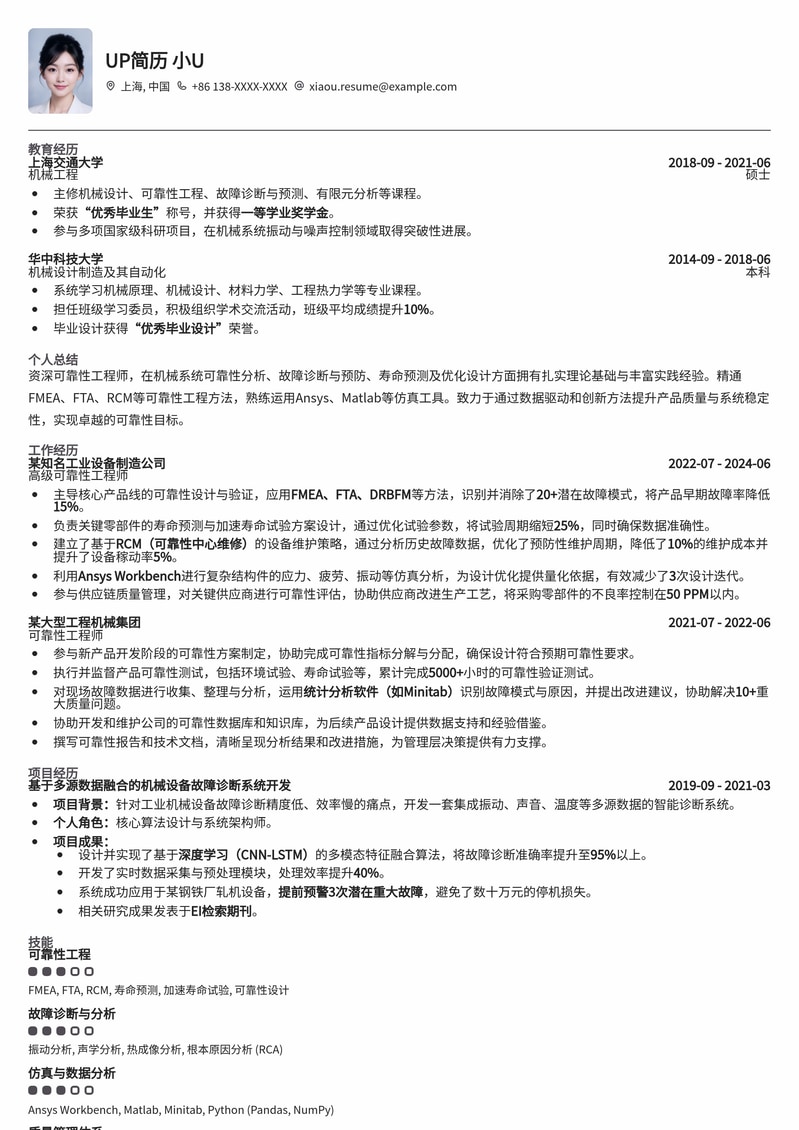
此可靠性工程师简历模板专为机械制造及相关行业从业者设计,突出工程背景、故障分析与预防能力。模板结构清晰,重点强调项目经验、数据分析技能和对产品全生命周期的质量把控。适用于寻求在制造业、航空航天、汽车等领域发展的可靠性工程师。
此模板专为CAE分析工程师和仿真工程师设计,尤其适合在机械制造、汽车、航空航天等行业寻求力学仿真、结构分析、流体仿真等相关职位的专业人才。模板聚焦于项目经验、仿真软件技能(如ABAQUS, ANSYS, COMSOL, Adams等)、分析能力、问题解决能力以及研发成果的展示,助您突出专业优势,快速获得面试机会。适用于社招及有相关经验的求职者。
专业指导,提升简历质量
解析航空工业通飞2026秋招提前批,澄清“物流供应链”标签背后的真实业务。分析不限专业的投递机会、岗位偏向运营保障而非核心研发的特点,帮助应届生判断是否值得在8月16日截止前投递。
解读中国电信人工智能研究院(TeleAI)2026秋招。分析央企背景下的“全域算力自由”优势,拆解研究员与研究科学家岗位的专业门槛,帮应届生判断是否值得投递。
解读航天五院504所2026暑期实习简章。明确仅招通信、软件、AI三大类专业,分析卫星载荷研发岗位的真实工作内容。剖析央企科研院所“高稳定、强保密”的职场属性,帮你判断是否值得投递。
深度解读2026安吉智行物流暑期实习招聘。依托上汽集团,业务稳定适合求稳派。本文分析数字技术、物流管理、小语种及财务四大核心岗位,指出创新空间有限的短板,帮你判断是否匹配职业规划。
中欧基金2026暑期实习招聘解读:管理规模行业前列,500-999人精品化团队。开放量化研究、行业研究及营销策划三类岗位,硕士起步,留用机制明确。分析核心投研体系价值及简历准备重点,助金融应届生判断投递性价比。
德国莱茵 TUV 集团 2026 暑期实习开启。本文解读其“技术 + 标准”职业路径,分析机械、化工类岗位的含金量与竞争热度。涵盖德企福利(年底双薪、15 天年假)及转正机会,助理工科学生判断是否值得投递。
广西柳工机械2026暑期实习招聘解读。分析技术研发、职能管理及海外岗位需求,评估国企稳定性与薪资水平,为想深耕机械自动化领域的双非及本科生提供投递建议。
资深空间机器人末端执行器工程师,在力位混合控制、太空环境适应性材料与精密驱动领域拥有深厚理论基础与实践经验。精通多自由度机器人系统设计与优化,具备从概念设计到样机测试全流程能力,致力于通过创新技术推动空间机器人技术发展,实现高精度、高可靠性的空间操作任务。
中国空间技术研究院
国家重点实验室
校企合作项目
博士 · 机械工程 (机器人方向)
硕士 · 机械设计制造及其自动化
力位混合控制 · 自适应控制 · PID控制 · 轨迹规划 · 运动学/动力学建模
伺服系统 · 减速器设计 · 轴承选型 · 传感器集成 · 有限元分析 (FEA)
耐辐射材料 · 真空润滑 · 热控设计 · 可靠性测试 · 材料选型与评估
MATLAB/Simulink · C++ · Python · ROS · Adams · SolidWorks
需求分析 · 系统集成 · 测试验证 · 风险评估 · 技术文档撰写
机器人学会
掌握ROS核心模块开发与系统集成能力
MathWorks
熟练运用MATLAB/Simulink进行机器人建模与仿真
教育部
表彰在学术研究和综合表现方面的卓越成就
清华大学
授予在校期间学习成绩优异、科研成果突出、综合素质全面的毕业生
选择专业模板,AI智能填写,3分钟完成简历制作