
中国联通2026暑期实习:4.4K月薪换转正直通卡值不值?
深度解读中国联通2026暑期实习项目,分析4.4K月薪背后的转正机会、户口指标优势及核心技术岗门槛。对比互联网大厂薪资,帮助应届生判断央企“直通卡”是否值得投递。
此模板专为协作机器人安全感知领域的专业人士设计,重点突出激光雷达避障技术、触觉安全皮肤应用以及协同工作空间设计经验。适用于寻求在机器人、自动化或智能制造行业中,从事安全系统开发、人机协作优化或相关研发岗位的候选人。
本模板特别适合协作机器人安全感知工程师岗位的求职者使用,具备不限工作经验的专业人士, 通过专业定制风格的设计,帮助您在AI人工智能 行业中脱颖而出,展现专业形象和核心竞争力。
使用模版创建简历
本简历模板专为NLP驱动智能体工程师设计,突出在对话式AI Agent构建方面的专业能力和项目经验。模板结构清晰,重点强调自然语言处理技术、大模型应用、多模态交互以及Agent框架搭建等核心技能,助力求职者快速获得面试机会。
此模板专为AI产品经理量身定制,特别是针对211高校背景的求职者,旨在突出其在人工智能领域的产品规划、设计及项目管理能力。模板设计简洁专业,重点突出AI项目经验和数据分析能力,助您在激烈的市场竞争中脱颖而出,轻松斩获心仪的AI产品经理热门岗位。
此EHS工程师简历模板专为安全、环保、健康领域专业人士设计。模板结构清晰,重点突出项目经验、合规管理、风险评估及应急响应能力。适用于制造业、化工、能源等注重EHS管理的行业,帮助求职者高效展现专业素养和实战经验,助力职业发展。
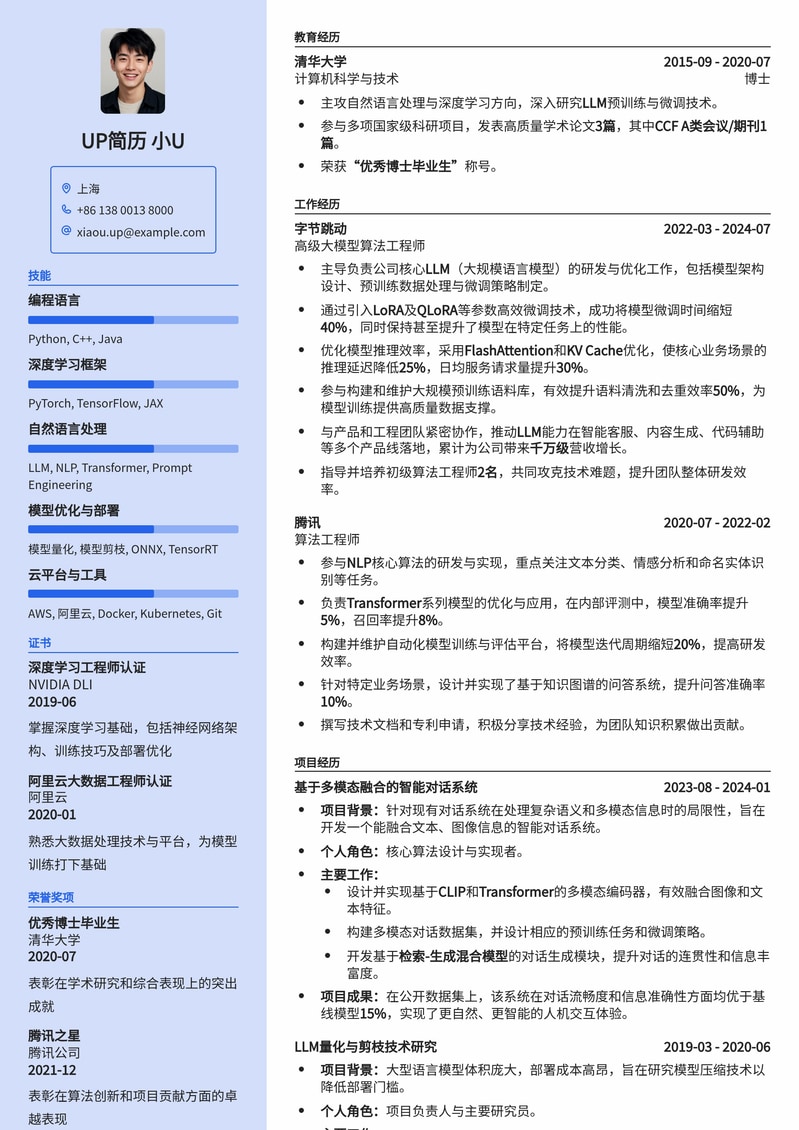
本模板专为大模型算法工程师设计,强调AI技术深度、LLM项目经验和算法优化能力。布局清晰,逻辑严谨,突出量化成果,助力AI领域专业人士脱颖而出。适用于有志于在大模型、深度学习、自然语言处理等前沿领域发展的算法工程师。
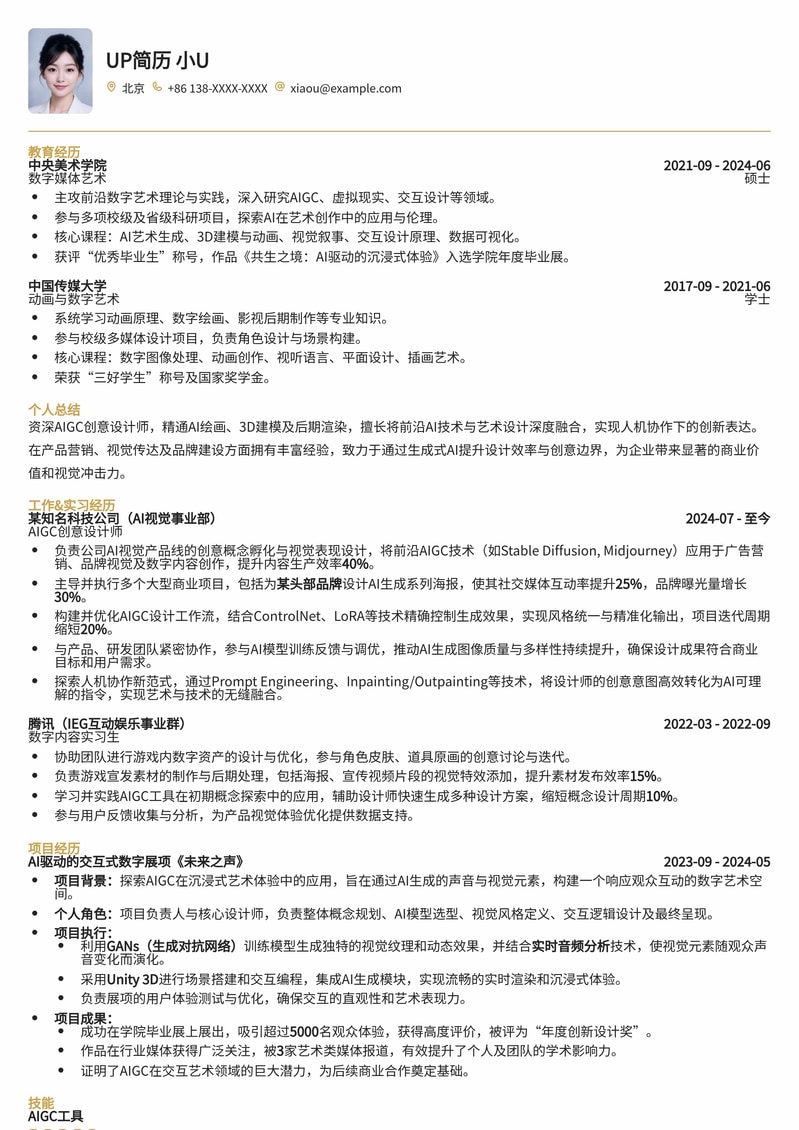
本模板专为AIGC创意设计师量身定制,强调人机协作的设计理念与实践成果。模板设计简洁现代,突出AI工具应用能力、创意产出及项目经验,助您在AI与艺术融合的浪潮中脱颖而出。
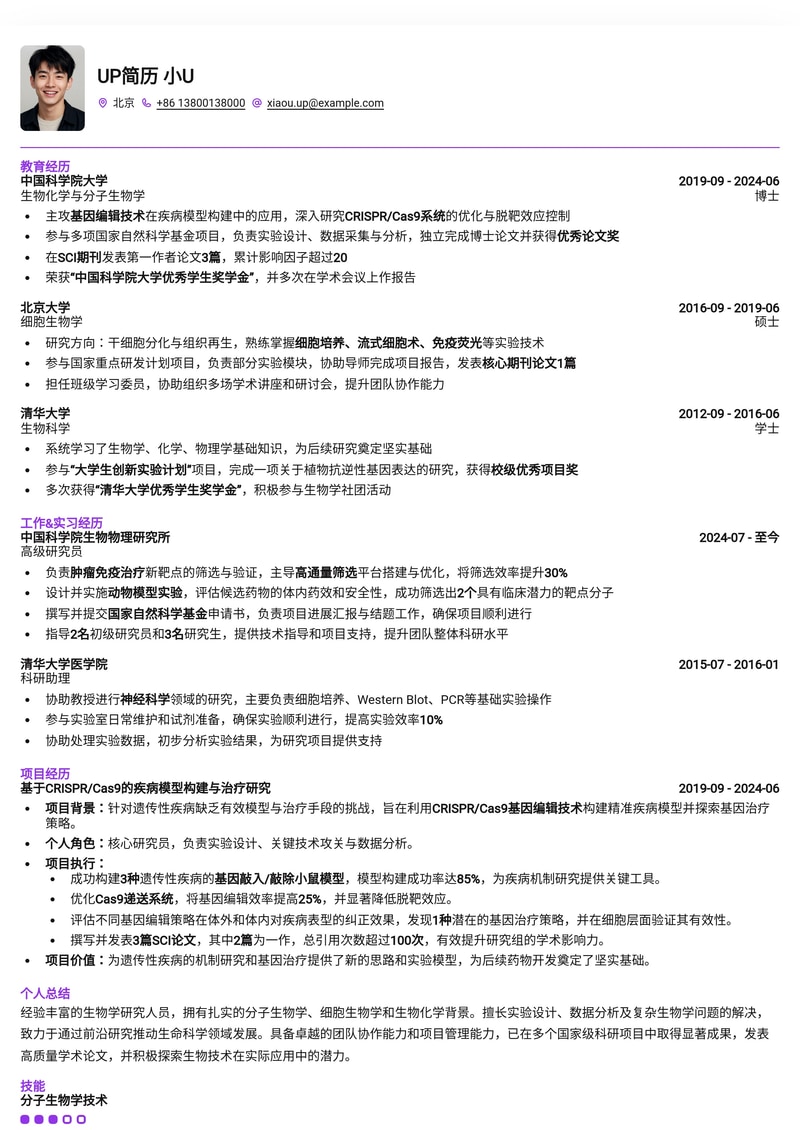
本模板专为生物学研究人员量身定制,突出科研项目经验、实验技能、论文发表及数据分析能力。结构清晰,重点突出,旨在帮助求职者快速展示其在生物科学领域的专业素养和学术贡献,助力其在生物科技、医药研发、高校及科研机构等领域脱颖而出。
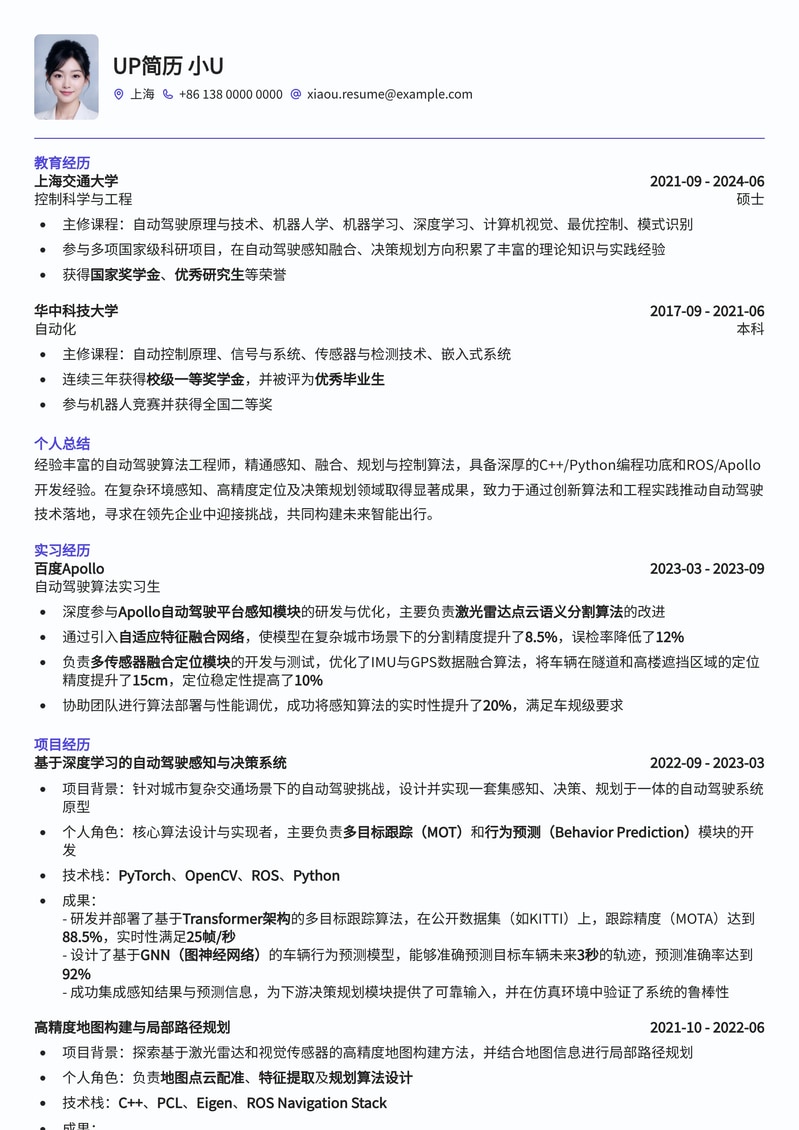
本模板专为211高校的自动驾驶算法工程师设计,聚焦于突出算法研发能力、项目经验和创新思维。模板结构清晰,强调技术栈匹配度与解决实际问题的能力,助力求职者在激烈的自动驾驶领域竞争中脱颖而出,斩获高薪offer。
这份专业的AIGC多模态内容生成专家简历模板,专为在人工智能和内容创作领域寻求突破的专业人士设计。模板突出多模态技术应用能力、创新思维和项目成果,助力您在竞争激烈的AIGC领域脱颖而出,获得心仪的高薪职位。适用于希望展示其在文本、图像、音频、视频等多种模态内容生成方面专业技能的求职者。
专业指导,提升简历质量
深度解读中国联通2026暑期实习项目,分析4.4K月薪背后的转正机会、户口指标优势及核心技术岗门槛。对比互联网大厂薪资,帮助应届生判断央企“直通卡”是否值得投递。
中科院光电所2026提前批启动,截止2026年8月。成都事业单位编制,硕士起步,主打自适应光学等硬科技。适合追求稳定、户口及科研平台的毕业生,高薪变现者慎投。
财通证券2026暑期实习面向硕士开放,虽标榜不限专业,但实际门槛不低。本文解读其长三角地域优势、研究所业务特色及研究助理与销售岗的真实招聘逻辑,帮你判断是否值得投递。
解析物产中大城投2026暑期实习招聘。背靠世界500强,宁波本地国企稳定性高,职能与业务双轨开放。虽称不限专业,但实际竞争门槛不低,适合追求长期发展的应届生。
结行科技2026秋招补录开启,聚焦结算清算与风控合规岗位。本文解读公司金融支付背景、岗位核心要求及补录竞争态势,帮助应届生判断投递价值。
麦米电气2026届暑期实习启动,专为硕士生提供长沙研发岗机会。项目覆盖通信与结构设计方向,提供往返高铁票及住宿餐饮福利。作为能源赛道硬科技企业,该实习是避开秋招竞争、争取转正留用的关键途径。
厦门量潮科技2026暑期实习招聘解读。业务跨度大,技术运营法务全招,薪资面议需警惕。分析“AI原生”工作流是真实赋能还是营销噱头,帮大学生判断投递价值。
资深协作机器人安全感知专家,精通<strong>激光雷达避障算法</strong>、<strong>触觉安全皮肤设计</strong>与<strong>人机协同工作空间规划</strong>。在多模态传感器融合、实时环境感知及安全策略部署方面拥有深厚经验,致力于提升协作机器人安全等级与运行效率。主导并优化多项机器人安全系统,有效降低事故率达<strong>25%</strong>,显著提升了生产力与用户体验。
某知名机器人技术公司
公司内部研发项目
公司创新实验室项目
硕士 · 机器人工程
本科 · 自动化
激光雷达避障 · 触觉安全皮肤 · 人机协同工作空间设计 · 多模态传感器融合 · 实时环境感知
Python · C++ · ROS · PCL · OpenCV
SLAM · 路径规划 · 目标跟踪 · 机器学习 · 深度学习
传感器集成 · 嵌入式系统 · Linux · RTOS
ISO 13849 · IEC 61508 · Git · Jira · SolidWorks
德国莱茵TÜV
证明具备设计、评估和验证机器安全控制系统的专业能力。
机器人学会
熟练掌握ROS框架下的机器人系统开发与集成。
某知名机器人技术公司
表彰在协作机器人安全感知系统研发中的突出贡献。
上海交通大学
表彰在机器人工程领域的优秀学术表现。
选择专业模板,AI智能填写,3分钟完成简历制作