
211高校专属:自动驾驶算法工程师高薪offer简历模版
本模板专为211高校的自动驾驶算法工程师设计,聚焦于突出算法研发能力、项目经验和创新思维。模板结构清晰,强调技术栈匹配度与解决实际问题的能力,助力求职者在激烈的自动驾驶领域竞争中脱颖而出,斩获高薪offer。
模板亮点
- 算法能力突出:强化算法理论与实践经验展示
- 项目经验细化:深度解析自动驾驶相关项目贡献
- 技术栈匹配优化:精准匹配行业主流技术要求
- 数据驱动亮点:强调数据分析与优化能力
- 针对211高校学生特点优化
相关标签
适用人群
本模板特别适合自动驾驶算法工程师岗位的求职者使用,具备不限工作经验的专业人士, 通过技术类风格的设计,帮助您在AI人工智能 行业中脱颖而出,展现专业形象和核心竞争力。
使用模版创建简历相关模板
同样优秀的技术类风格模板
高效客户端开发工程师简历模板(iOS/Android双平台优化)
本简历模板专为iOS和Android客户端开发工程师设计,强调技术深度与项目经验。模板结构清晰,突出开发技能、项目亮点和技术栈,帮助求职者快速吸引招聘官注意,尤其适合有iOS或Android双平台开发经验的工程师。简洁专业的版面布局,确保信息传达高效。
数字IC设计工程师专业简历模板:高效展现芯片设计实力
本模板专为数字IC设计工程师量身打造,突出您的芯片设计、验证、综合与布局布线等核心技能。结构清晰,重点突出项目经验与技术成果,助您在众多求职者中脱颖而出,快速获得心仪的数字IC设计职位面试机会。

推荐算法工程师高薪简历模板:斩获大厂offer,突出项目经验与数据能力
本简历模板专为推荐算法工程师量身定制,突出项目经验、模型优化能力和数据分析洞察力。通过清晰的结构和重点内容展示,帮助求职者在众多简历中脱颖而出,直击HR和面试官的关注点,提高面试邀约率。适用于1-5年推荐算法经验的求职者。
新能源汽车控制系统工程师简历模板:专业、高效、助力职业腾飞
本简历模板专为车辆控制系统工程师量身定制,尤其适用于新能源汽车领域的专业人才。模板设计简洁大气,内容结构清晰,突出项目经验、技术专长和解决问题能力。无论是资深工程师寻求职业突破,还是有志于进入新能源汽车行业的求职者,都能通过此模板高效展示核心竞争力,助力您在激烈的市场竞争中脱颖而出。
跨领域求职优选:云计算工程师专业简历模板
本简历模板专为有志于转行或跨领域发展为云计算工程师的人士设计。模板突出项目经验、技术栈和学习能力,强调可迁移技能,帮助您在激烈的竞争中脱颖而出,成功转型云计算领域。简洁高效的布局,让招聘经理快速捕捉您的核心优势。
NLP驱动智能体工程师简历模板:对话式AI Agent构建专家
本简历模板专为NLP驱动智能体工程师设计,突出在对话式AI Agent构建方面的专业能力和项目经验。模板结构清晰,重点强调自然语言处理技术、大模型应用、多模态交互以及Agent框架搭建等核心技能,助力求职者快速获得面试机会。
LLM大模型算法工程师简历模板:突出AI技术与项目经验
本模板专为大模型算法工程师设计,强调AI技术深度、LLM项目经验和算法优化能力。布局清晰,逻辑严谨,突出量化成果,助力AI领域专业人士脱颖而出。适用于有志于在大模型、深度学习、自然语言处理等前沿领域发展的算法工程师。
AI产品经理专属简历模板:211高校热门岗求职利器
此模板专为AI产品经理量身定制,特别是针对211高校背景的求职者,旨在突出其在人工智能领域的产品规划、设计及项目管理能力。模板设计简洁专业,重点突出AI项目经验和数据分析能力,助您在激烈的市场竞争中脱颖而出,轻松斩获心仪的AI产品经理热门岗位。
简历写作
专业指导,提升简历质量
2026浙江省数字经济发展中心暑期实习:体制内数据岗值不值得投?
解读浙江省数字经济发展中心2026暑期实习招募。分析“体制内+专业岗”的含金量,对比互联网大厂节奏,明确适合考公、智库研究及政策分析方向的同学,拆解核心岗位与投递策略。
水发集团2026春招:大专可报但专业卡得死,值不值得投?
山东省属国企水发集团2026春招启动,学历包容性强(大专起),但核心岗位严格限制水利、能源及农业工程类专业。本文解读其稳定性优势、一线工作性质及适合人群,助你快速判断投递价值。
宁波能源2026春招:不限专业能投吗?国企岗位与稳定性解读
宁波能源2026春招解读:作为宁波市属国有控股上市公司,主业涵盖热电联产及风光发电。文章分析其“铁饭碗”属性、技术岗倒班常态及职能岗竞争情况,帮助应届生判断是否值得投递。
模板内容
UP简历 小U
个人总结
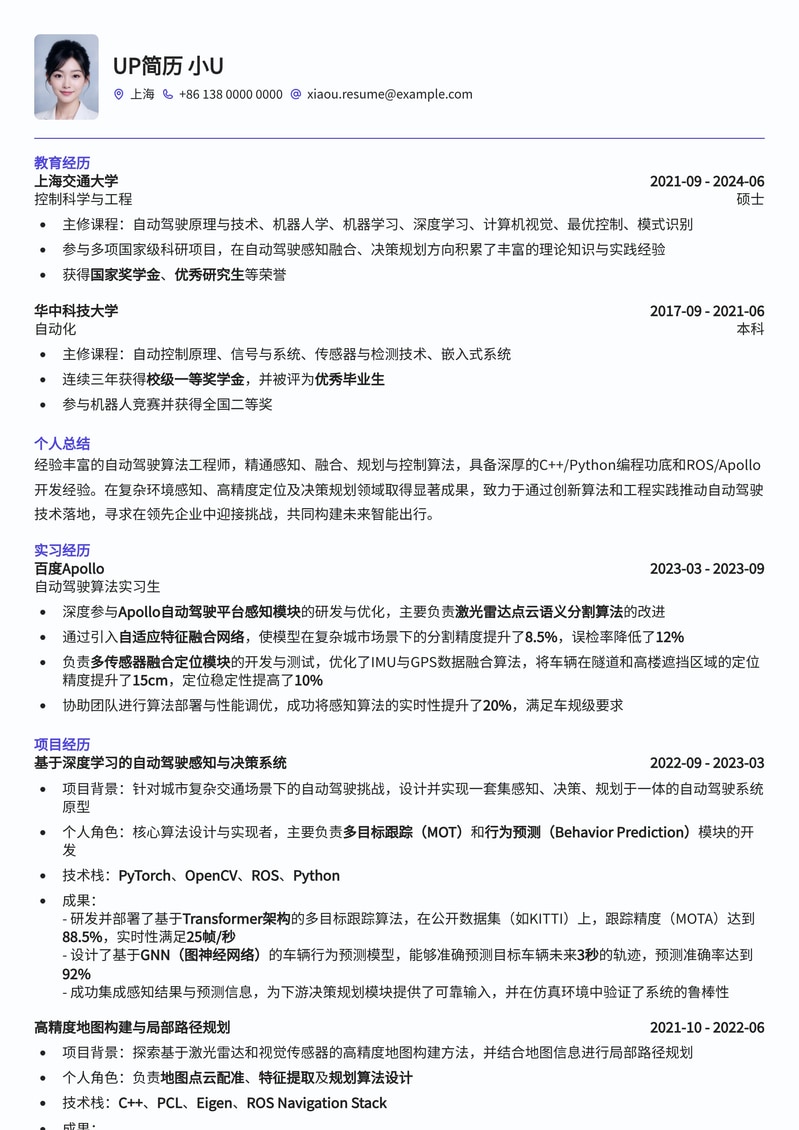
经验丰富的自动驾驶算法工程师,精通感知、融合、规划与控制算法,具备深厚的C++/Python编程功底和ROS/Apollo开发经验。在复杂环境感知、高精度定位及决策规划领域取得显著成果,致力于通过创新算法和工程实践推动自动驾驶技术落地,寻求在领先企业中迎接挑战,共同构建未来智能出行。
工作经历
自动驾驶算法实习生
百度Apollo
- 深度参与Apollo自动驾驶平台感知模块的研发与优化,主要负责激光雷达点云语义分割算法的改进
- 通过引入自适应特征融合网络,使模型在复杂城市场景下的分割精度提升了8.5%,误检率降低了12%
- 负责多传感器融合定位模块的开发与测试,优化了IMU与GPS数据融合算法,将车辆在隧道和高楼遮挡区域的定位精度提升了15cm,定位稳定性提高了10%
- 协助团队进行算法部署与性能调优,成功将感知算法的实时性提升了20%,满足车规级要求
项目经历
基于深度学习的自动驾驶感知与决策系统
校级科研项目
- 项目背景:针对城市复杂交通场景下的自动驾驶挑战,设计并实现一套集感知、决策、规划于一体的自动驾驶系统原型
- 个人角色:核心算法设计与实现者,主要负责多目标跟踪(MOT)和行为预测(Behavior Prediction)模块的开发
- 技术栈:PyTorch、OpenCV、ROS、Python
- 成果:
- 研发并部署了基于Transformer架构的多目标跟踪算法,在公开数据集(如KITTI)上,跟踪精度(MOTA)达到88.5%,实时性满足25帧/秒
- 设计了基于GNN(图神经网络)的车辆行为预测模型,能够准确预测目标车辆未来3秒的轨迹,预测准确率达到92%
- 成功集成感知结果与预测信息,为下游决策规划模块提供了可靠输入,并在仿真环境中验证了系统的鲁棒性
高精度地图构建与局部路径规划
实验室项目
- 项目背景:探索基于激光雷达和视觉传感器的高精度地图构建方法,并结合地图信息进行局部路径规划
- 个人角色:负责地图点云配准、特征提取及规划算法设计
- 技术栈:C++、PCL、Eigen、ROS Navigation Stack
- 成果:
- 实现了基于LOAM/LIO-SAM的实时SLAM算法,构建了0.05m精度的高精度地图,地图构建效率提升了30%
- 开发了融合A*算法与Dijkstra算法的混合路径规划器,结合高精度地图信息,显著提升了路径的平滑性和安全性,规划成功率达到98%
- 优化了局部避障策略,在复杂动态障碍物环境下,紧急避障响应时间缩短了0.2秒
教育背景
上海交通大学
硕士 · 控制科学与工程
华中科技大学
本科 · 自动化
- 主修课程:自动驾驶原理与技术、机器人学、机器学习、深度学习、计算机视觉、最优控制、模式识别
- 参与多项国家级科研项目,在自动驾驶感知融合、决策规划方向积累了丰富的理论知识与实践经验
- 获得国家奖学金、优秀研究生等荣誉
- 主修课程:自动控制原理、信号与系统、传感器与检测技术、嵌入式系统
- 连续三年获得校级一等奖学金,并被评为优秀毕业生
- 参与机器人竞赛并获得全国二等奖
技能专长
编程语言
C++ · Python · MATLAB
自动驾驶框架
ROS · Apollo · Autoware
感知算法
激光雷达点云处理 · 视觉感知 · 多传感器融合 · 目标检测与跟踪
决策规划
行为预测 · 路径规划 · 运动控制 · 轨迹优化
深度学习框架
PyTorch · TensorFlow · OpenCV
开发工具
Git · Linux · Docker · Gazebo
证书资质
自动驾驶系统工程师认证
中国汽车工程学会
证明在自动驾驶系统设计、开发与测试方面的专业能力
ROS机器人开发工程师认证
机器人技术联盟
证明熟练掌握ROS框架进行机器人软件开发
获奖经历
国家奖学金
教育部
表彰在学术研究和综合表现方面的突出成就
优秀毕业生
华中科技大学
表彰在本科期间的卓越学业成绩和综合素质
开始使用211高校专属:自动驾驶算法工程师高薪offer简历模版模板
选择专业模板,AI智能填写,3分钟完成简历制作